Mensch-Roboter-Interaktion
Prof. Dr. Dominik Henrich
Prof. Dr. Diedrich Wolter
Natürliche Sprache ist unser wichtigstes und alltägliches Kommunikationsmittel, da sie sehr flexibel in der Anwendung ist und sie uns erlaubt, komplexe Sachverhalte kompakt darzulegen. Es wäre daher wünschenswert, Sprache als intuitive Schnittstelle zu teilautonomen Systemen wie zum Beispiel Servicerobotern nutzen zu können. Insbesondere könnten dadurch derartige Systeme von Laien bedient werden, was eine wichtige Voraussetzung für Akzeptanz in der breiten Masse und das Erreichen eines gesamtgesellschaftlichen Nutzens ist. Dem Ziel stehen allerdings noch viele Herausforderungen entgegen, denn sprachlich übermittelte Information ist oft unterbestimmt und müsste von den Systemen im aktuellen Kontext geeignet interpretiert werden.
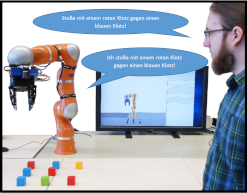
Ziel dieses Vorhabens ist es, algorithmische Methoden zu entwickeln, die den situativen Anwendungskontext erfassen können und anhand dessen sprachliche Instruktionen interpretieren. Dies erlaubt Anwendern intuitive Anweisungen zu formulieren, die keine für die Systeme irrelevanten Informationen enthalten. Beispielsweise würde eine typische Anweisung aus der zwischenmenschlichen Kommunikation wie "Reich mir die Schraube!" genügen, dass der Roboter in der aktuellen Aufgabe die intendierte und passende Schraube auswählt und anreicht. Neben den genannten Servicerobotern ist dies insbesondere für Anwendungen im Industrie-4.0- und Smart-Environments-Umfeld relevant.
Verantwortliche
Prof. Dr. Dominik Henrich, Universität Bayreuth
Prof. Dr. Tom Gross, Universität Bamberg
Roboter und automatisierte Systeme sind aus der industriellen Fertigung nicht mehr wegzudenken. Die dort verwendeten Systeme werden typischer Weise für sich wiederholende Aufgaben eingesetzt, die für den Menschen schwierig zu bewältigen wären, wie etwa das häufige und exakte Platzieren schwerer Lasten. Nach heutigem Stand der Technik müssen die Roboter dabei für eine spezifische Aufgabe aufwändig programmiert werden. Die Programmierung des Roboters erfolgt dabei in der Regel rein textuell. Das bedeutet, dass die Programme im „klassischen Stil“ per Programmiersprache ausschließlich mittels Texteingabe entstehen. Im Vergleich zu dieser, nur auf Text reduzierten Schnittstelle, basiert die zwischenmenschliche Kommunikation in der Regel auf mehreren Kommunikationskanälen (Modalitäten). Beispielsweise kann die Mimik und Gestik gesprochene Inhalte unterstützen bzw. verdeutlichen, und häufig ist Ironie nur durch den Tonfall eines gesprochenen Satzes zu erkennen. Im technischen Umfeld wird diese Kombination aus verschiedenen Kanälen zum Informationsaustausch als multimodale Interaktion bezeichnet.
Das Ziel des TAO-Projekts „Mensch-Roboter-Interaktion“ ist die Untersuchung weiterer Kommunikationsmodalitäten zwischen Mensch und Robotersystem, in Anlehnung an die natürliche, menschliche Kommunikation. Besonderes Augenmerk gilt dabei den multimodalen Interaktionskonzepten, die es Nutzern ermöglichen, Befehle in vielfältiger Weise an das System zu übermitteln, um so einen intuitiven Umgang mit dem Robotersystem zu ermöglichen. Dazu werden intuitive multimodale Interaktionskonzepte entwickelt und untersucht, die es Benutzern weitgehend ohne technische Kenntnisse ermöglichen, Roboter für ihre Anwendungen zu nutzen. Die bidirektionale Interaktion reicht von der direkten Kommandierung über die Kommissionierung und Programmierung des Roboters bis hin zur Mensch/Roboter-Kooperation. In allen Fällen muss ein akzeptables Verhältnis von Kosten (z.B. Kommunikationsaufwand) zu Nutzen (z.B. Automatisierungsgrad) erreicht werden. Mit diesen Interaktionskonzepten sollen die Vorteile des Roboters, wie Stärke, Schnelligkeit, Ausdauer, Genauigkeit und Reproduzierbarkeit, für neue Anwendungen zugänglich gemacht werden.
Multimodale Interaktionskonzepte ermöglichen nicht nur die Verwendung von existierenden Modalitäten je nach Vorliebe oder Fähigkeit des Nutzers, sondern im Bedarfsfall auch eine vergleichsweise einfache Erweiterung und Umsetzung von zusätzlichen Modalitäten. Des Weiteren ist denkbar, mit unterschiedlichen Modalitäten unterschiedlich umfangreiche Funktionalitäten anzusprechen. Während einfache Tasten lediglich eine binäre Information übermitteln können, erlauben schon einzelne Worte eine vielfältige Variation von Befehlen.
Eine durch diese multimodale Bedienbarkeit deutlich intuitivere und vereinfachte Programmierung und Bedienung von Robotersystemen eröffnet ein ganzes Spektrum neuer Anwendungen von Roboter-Manipulatoren in kleinen und mittleren, produzierenden Unternehmen über die Service- und Unterhaltungsbranche bis hin zum Privathaushalt, in dem Roboter etwa unbequeme Aufgaben übernehmen oder ältere Menschen im Alltag unterstützen und so eine längere, selbstständige Lebensführung ermöglichen können. Selbst in der Großindustrie, wo derzeit ausschließlich hochoptimierte und aufwändig eingerichtete Industrieroboter vorherrschen, sind Anwendungen denkbar. Über die industrielle Automatisierung hinaus gibt es gerade in privaten Haushalten immer mehr Geräte, welche selbständig Arbeiten verrichten können (z.B. selbstfahrende Staubsauger und Rasenmäher) als auch Informations- und Kommunikationstechnologie (Desktop Computer, Smartphones, Tablets, Unterhaltungselektronik, etc.). Auch hierfür werden neue Interaktionskonzepte benötigt, welche den Endbenutzern eine einfache und intuitive Konfiguration und Programmierung ihrer Umgebungen ermöglichen.
Insgesamt ermöglicht die multimodale Bedienbarkeit des Robotersystems die Erforschung eines Geräts, für dessen Bedienung sich der Mensch nicht dem Gerät anpassen muss, sondern das Gerät sich dem Menschen anpasst.
Verantwortlicher
Prof. Dr. Kolja Kühnlenz
Hochschule Coburg
Die enge Zusammenarbeit zwischen Mensch und Roboter gewinnt zunehmend an Bedeutung im industriellen Umfeld oder in Heimanwendungen. Hierbei sind intuitive Ausgestaltungen von Robotern und Interaktionsmechanismen von wesentlicher Bedeutung, um eine fließende Zusammenarbeit möglichst nach Maßstäben des menschlichen Vorbilds zu ermöglichen. Weitgehend ungeklärt sind physiologische oder psychologische Wirkungen der engen Mensch-Roboter-Kooperation, insbesondere vor dem Hintergrund einer Zusammenarbeit über lange Zeiträume. In diesem Projekt werden derartige Einflüsse der Mensch-Roboter-Kooperation untersucht und langfristig in der Systementwicklung berücksichtigt. Erste Ergebnisse zeigen einen signifikanten Einfluss robotischer Bahnkurven auf die Herzrate des Menschen. In einem ersten Ansatz konnte durch die Integration menschenähnlicher Bahnkurven bei Industrierobotern die Herzrate auf nahezu den Ruhepuls verringert werden. Die Selbstwahrnehmung des Menschen und der reale physiologische Einfluss der Interaktion stellten sich dabei allerdings teilweise als gegenläufig heraus. Für den praktischen Einsatz interaktiver Roboter und dessen Bewertung hinsichtlich gesundheitlicher Auswirkungen ist daher abzuleiten, dass grundsätzlich begleitende physiologische Messungen durchgeführt werden sollten, da fragebogenbasierte Ansätze die reale Belastungssituation möglicherweise nicht adäquat wiederspiegeln.